왜 우리에게 당신의 사업을 신뢰합니까?
우리는 조달에서 공황 상태를 벗어납니다. 우리는 신뢰할 수있는 출처에서 찾기 힘든 수백만의 부품을 재고 있습니다. 분 단위로 제품 목록을 새로 고침하고 온라인 구매가 실시간으로 완료되고 매일 배송됩니다.
2002 년에 설립 된 MFGChips는 전자 부품 유통 분야의 로컬 리더로서 오늘날 현지 시장에서 가장 존경 받고 혁신적인 기업으로 인정 받고 있습니다. 홍콩에 본사를두고있는 MFGChips은 탁월한 서비스를 제공하고 효율적이고 포괄적 인 글로벌 공급망 솔루션을 개발하여 명성을 얻고 있습니다.
더 알아보기 >
로봇은 무스에서 영감을 얻은 발을 얻습니다
Tallinn University of Technology (Taltech)의 연구원들은 진흙이나 젖은 눈과 같은 어려운 표면의 이동성을 향상 시키도록 설계된 새로운 유형의 바이오에서 영감을 얻은 로봇 발을 만들었습니다.그들의 연구는 이러한 혁신이 어떻게 로봇이 복잡한 자연 지형을 탐색하고, 환경 모니터링, 농업 및 재난 대응을 지원할 수있는 방법을 강조합니다.
다리가있는 로봇은 수십 년 동안 연구되어 왔으며 에너지 효율이 높고 적응력이 높아지고 있지만, 특정 자연 지형은 특히 도전적입니다.이 새로운 발은 로봇이 다른지면 조건으로의 움직임을 조정하는 방법을 개선함으로써 그러한 장애물을 극복하는 것을 목표로합니다.
실제 무스 피트를 사용한 실험실 실험은 고유 한 기능을 확인했습니다.진흙으로 들어오고 나올 때, 무스의 스플릿 발은 팽창하고 수축되어 접촉 영역을 조정합니다.그러나 주요 장점은 표면적이 증가하지 않습니다.대신, 그것은 정향 발굽이 진흙에서 꺼낼 때 흡입력을 깨뜨리는 방법에서 비롯됩니다.
연구원들은 무스의 발굽이 흡입 컵과 유사하게 기능한다는 것을 관찰했습니다.발굽은 모양을 조정함으로써 표면에서 흡입 컵을 뿌린 것처럼 진흙으로 생성 된 흡입력을 깨뜨립니다.진흙은 젖은 욕실 타일과 비슷하게 행동하여 동물의 발 아래에서 흡입을 일으켜 다리를 들어 올리는 데 어려움을 겪습니다.발굽의 움직임은 이러한 긴장을 방해하여 더 쉬운 움직임을 촉진합니다.발굽은 움직임을 더 빠르고 에너지 효율적으로 만들어 동물이 너무 깊게 가라 앉거나 붙어 있고 멸망 할 수있는 치명적인 상황을 방지합니다.
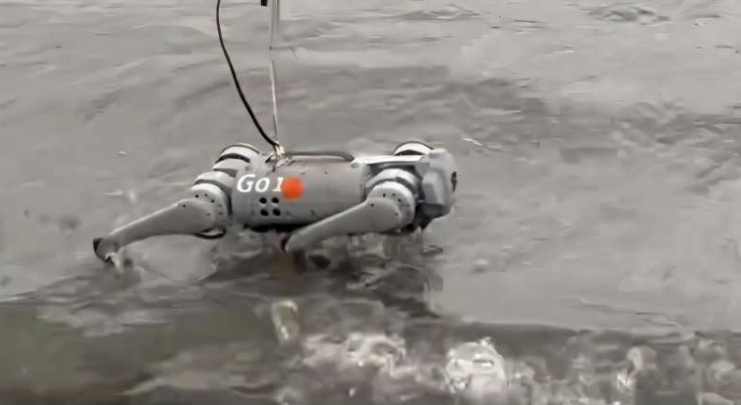
이에 영감을 얻은 연구원들은 동일한 행동을 모방하는 다리 로봇을 위해 실리콘 피트를 개발했습니다.진흙 표면에서의 테스트 결과,이 간단한 수정으로 로봇의 흡수력과 흡입력이 절반으로 줄어들어 에너지 소비가 최대 70%감소했습니다.
연구원들에 따르면, 수정 된 "Robo-Moose"발로 단점은 확인되지 않았다.
다리가있는 로봇은 수십 년 동안 연구되어 왔으며 에너지 효율이 높고 적응력이 높아지고 있지만, 특정 자연 지형은 특히 도전적입니다.이 새로운 발은 로봇이 다른지면 조건으로의 움직임을 조정하는 방법을 개선함으로써 그러한 장애물을 극복하는 것을 목표로합니다.
실제 무스 피트를 사용한 실험실 실험은 고유 한 기능을 확인했습니다.진흙으로 들어오고 나올 때, 무스의 스플릿 발은 팽창하고 수축되어 접촉 영역을 조정합니다.그러나 주요 장점은 표면적이 증가하지 않습니다.대신, 그것은 정향 발굽이 진흙에서 꺼낼 때 흡입력을 깨뜨리는 방법에서 비롯됩니다.
연구원들은 무스의 발굽이 흡입 컵과 유사하게 기능한다는 것을 관찰했습니다.발굽은 모양을 조정함으로써 표면에서 흡입 컵을 뿌린 것처럼 진흙으로 생성 된 흡입력을 깨뜨립니다.진흙은 젖은 욕실 타일과 비슷하게 행동하여 동물의 발 아래에서 흡입을 일으켜 다리를 들어 올리는 데 어려움을 겪습니다.발굽의 움직임은 이러한 긴장을 방해하여 더 쉬운 움직임을 촉진합니다.발굽은 움직임을 더 빠르고 에너지 효율적으로 만들어 동물이 너무 깊게 가라 앉거나 붙어 있고 멸망 할 수있는 치명적인 상황을 방지합니다.
이에 영감을 얻은 연구원들은 동일한 행동을 모방하는 다리 로봇을 위해 실리콘 피트를 개발했습니다.진흙 표면에서의 테스트 결과,이 간단한 수정으로 로봇의 흡수력과 흡입력이 절반으로 줄어들어 에너지 소비가 최대 70%감소했습니다.
연구원들에 따르면, 수정 된 "Robo-Moose"발로 단점은 확인되지 않았다.