왜 우리에게 당신의 사업을 신뢰합니까?
우리는 조달에서 공황 상태를 벗어납니다. 우리는 신뢰할 수있는 출처에서 찾기 힘든 수백만의 부품을 재고 있습니다. 분 단위로 제품 목록을 새로 고침하고 온라인 구매가 실시간으로 완료되고 매일 배송됩니다.
2002 년에 설립 된 MFGChips는 전자 부품 유통 분야의 로컬 리더로서 오늘날 현지 시장에서 가장 존경 받고 혁신적인 기업으로 인정 받고 있습니다. 홍콩에 본사를두고있는 MFGChips은 탁월한 서비스를 제공하고 효율적이고 포괄적 인 글로벌 공급망 솔루션을 개발하여 명성을 얻고 있습니다.
더 알아보기 >
운동 운동을위한 훈련 로봇
로봇이 운동 선수처럼 움직일 수 있습니까?새로운 교육 모델은 스포츠 움직임을 복제하는 데 도움이되지만 결과는 진행 상황과 예기치 않은 도전을 모두 보여줍니다.
Carnegie Mellon University의 AI 및 Robotics 연구원과 Nvidia의 두 명의 동료들과 함께 로봇을 훈련시키기 위해 새로운 모델을 만들었습니다.팀은 대부분의 로봇 훈련이 운동에 중점을 두어 효율적으로 움직이지 만 유동성이나 운동성이없는 로봇으로 이어지는 것을 관찰했습니다.이를 해결하기 위해 그들은 전신 훈련을 탐구했습니다.그들은 기존 모델에 적응성이 부족하고 너무 많은 매개 변수에 의존하여 로봇 움직임이 지나치게 조심스럽게 만들었습니다.이로 인해 새로운 2 단계 교육 프레임 워크가 개발되었습니다.
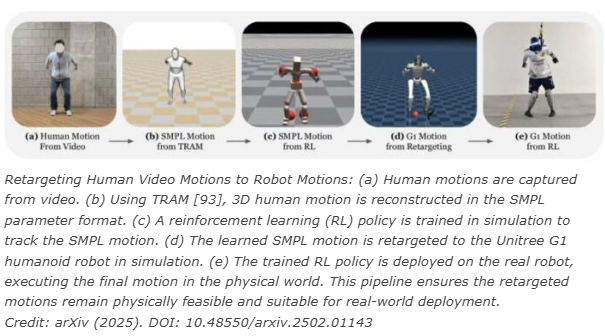
첫 번째 단계는 AI 모듈을 훈련하여 전신 인간 모션 비디오를 분석하여 모션 추적을 사용하여 로봇의 기능에 맞게 주요 움직임을 조정합니다.두 번째 단계는 실제 데이터를 모아 비디오의 인간 운동과 로봇이 물리적으로 움직일 수있는 방법 사이의 격차를 해소합니다.이 프로세스는 Aligning Simulation 및 Real Physics (ASAP)라는 프레임 워크로 이어졌습니다.
ASAP 프레임 워크는 4 단계로 구성됩니다.첫째, 모션 추적 사전 훈련 및 실제 궤적 수집에는 인간 비디오에서 인간형 모션을 다시 타겟팅하는 것이 포함됩니다.실제 운동 궤적을 생성하기 위해 다중 모션 추적 정책이 미리 훈련됩니다.다음으로 델타 액션 모델 교육은 실제 롤아웃 데이터를 사용하여 수행됩니다.이 단계는 시뮬레이션 된 상태와 실제 실제 상태 사이의 불일치를 최소화하여 모델의 정확성을 향상시킵니다.
정책 미세 조정 단계에서 델타 액션 모델은 시뮬레이터에 동결되어 실제 물리와 더 잘 맞도록 시뮬레이터에 통합됩니다.그런 다음 사전 훈련 된 모션 추적 정책은 정밀도를 높이기 위해 미세 조정됩니다.마지막으로, 실제 배치에서 미세 조정 정책은 델타 액션 모델에 의존하지 않고 실제 세계에서 직접 구현되어 로봇이 훈련 된 움직임을 독립적으로 수행 할 수 있도록합니다.
프레임 워크를 테스트하기 위해 연구원들은 상징적 인 스포츠 동작을 복제하기 위해 로봇을 훈련 시켰습니다.Kobe Bryant의 Fadeaway Jump Shot, LeBron James의 Silencer Move 및 Cristiano Ronaldo의 SIU가 중간 공기 스핀으로 공연했습니다.각 운동이 기록되었습니다.
로봇의 움직임은 유명한 스포츠 움직임과 분명히 닮아 전신 운동의 진전을 강조합니다.그러나 로봇이 프로 운동 선수에게 착각하기 전에 훨씬 더 많은 작업이 필요하다는 것도 분명합니다.
Carnegie Mellon University의 AI 및 Robotics 연구원과 Nvidia의 두 명의 동료들과 함께 로봇을 훈련시키기 위해 새로운 모델을 만들었습니다.팀은 대부분의 로봇 훈련이 운동에 중점을 두어 효율적으로 움직이지 만 유동성이나 운동성이없는 로봇으로 이어지는 것을 관찰했습니다.이를 해결하기 위해 그들은 전신 훈련을 탐구했습니다.그들은 기존 모델에 적응성이 부족하고 너무 많은 매개 변수에 의존하여 로봇 움직임이 지나치게 조심스럽게 만들었습니다.이로 인해 새로운 2 단계 교육 프레임 워크가 개발되었습니다.
첫 번째 단계는 AI 모듈을 훈련하여 전신 인간 모션 비디오를 분석하여 모션 추적을 사용하여 로봇의 기능에 맞게 주요 움직임을 조정합니다.두 번째 단계는 실제 데이터를 모아 비디오의 인간 운동과 로봇이 물리적으로 움직일 수있는 방법 사이의 격차를 해소합니다.이 프로세스는 Aligning Simulation 및 Real Physics (ASAP)라는 프레임 워크로 이어졌습니다.
ASAP 프레임 워크는 4 단계로 구성됩니다.첫째, 모션 추적 사전 훈련 및 실제 궤적 수집에는 인간 비디오에서 인간형 모션을 다시 타겟팅하는 것이 포함됩니다.실제 운동 궤적을 생성하기 위해 다중 모션 추적 정책이 미리 훈련됩니다.다음으로 델타 액션 모델 교육은 실제 롤아웃 데이터를 사용하여 수행됩니다.이 단계는 시뮬레이션 된 상태와 실제 실제 상태 사이의 불일치를 최소화하여 모델의 정확성을 향상시킵니다.
정책 미세 조정 단계에서 델타 액션 모델은 시뮬레이터에 동결되어 실제 물리와 더 잘 맞도록 시뮬레이터에 통합됩니다.그런 다음 사전 훈련 된 모션 추적 정책은 정밀도를 높이기 위해 미세 조정됩니다.마지막으로, 실제 배치에서 미세 조정 정책은 델타 액션 모델에 의존하지 않고 실제 세계에서 직접 구현되어 로봇이 훈련 된 움직임을 독립적으로 수행 할 수 있도록합니다.
프레임 워크를 테스트하기 위해 연구원들은 상징적 인 스포츠 동작을 복제하기 위해 로봇을 훈련 시켰습니다.Kobe Bryant의 Fadeaway Jump Shot, LeBron James의 Silencer Move 및 Cristiano Ronaldo의 SIU가 중간 공기 스핀으로 공연했습니다.각 운동이 기록되었습니다.
로봇의 움직임은 유명한 스포츠 움직임과 분명히 닮아 전신 운동의 진전을 강조합니다.그러나 로봇이 프로 운동 선수에게 착각하기 전에 훨씬 더 많은 작업이 필요하다는 것도 분명합니다.